







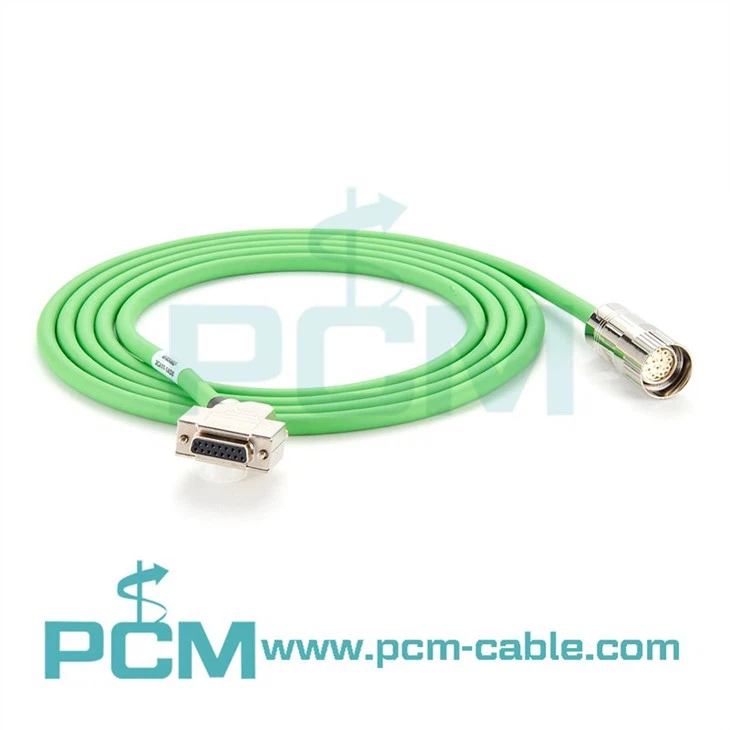
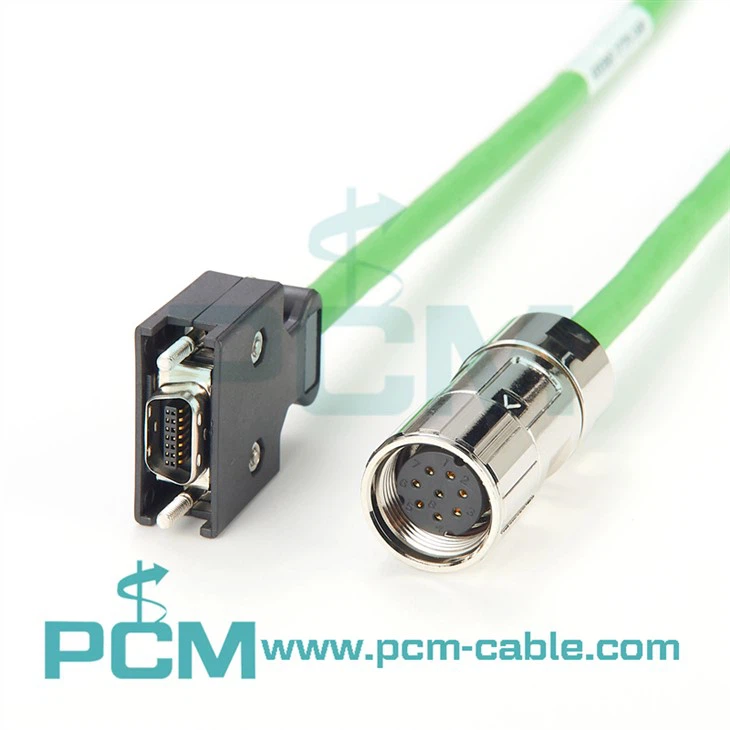
スピンドルエンコーダ信号フィードバックケーブル 6FX5002-2CA11
サーボモーターとエンコーダーモーターの機能と違いは何ですか?
関数
サーボ モーターは、エンコーダーからのフィードバックを使用して特定の位置まで回転できる回転アクチュエーターです。サーボモーターはローター、配線、制御回路、フィードバック装置で構成されています。制御回路はローターの実際の位置を望ましい位置と比較し、ローターを目標位置に移動させるために必要な量のトルクをローターに加えます。
エンコーダモータは、シャフトにエンコーダが取り付けられたタイプのモータです。エンコーダは、モーターの位置、速度、方向に関するフィードバックを提供します。エンコーダモーターは、エンコーダからのフィードバックを使用して速度と位置を監視および調整することで、正確に制御できます。
違い
サーボ モーターとエンコーダー モーターの主な違いは、モーターを調整するために使用される制御メカニズムです。サーボ モーターは、エンコーダーからのフィードバックを使用してモーターの動きを調整する閉ループ制御システムを使用します。一方、エンコーダ モータは、エンコーダ フィードバックの精度に依存してモータの速度と位置を制御する開ループ制御システムを使用します。
2 つのモーターのもう 1 つの違いは、制御システムの複雑さです。サーボ モーターは閉ループ制御システムを使用するため、エンコーダー モーターよりも複雑な制御システムが必要です。エンコーダ モーターはそれほど複雑ではないため、安価で使いやすくなっています。
仕様
| 製品名 | M23 12 ピン メス - DB15 ピン メス ケーブル アセンブリ |
| モデル | 6FX5002-2CA11、6FX5002-2CA20、6FX5002-2CA31、6FX5002-2CF10、6FX5002-2AH11、6FX8002-2CA31、6FX{ {19}}CT31、6FX8002-2MK00 |
| コネクタ1 | M23 12 ピン メス |
| コネクタ2 | DB15ピンメス |
| 使用法 | インクリメンタルエンコーダ |
| 材料 | 純銅 |
| 接触 | 金メッキ |
| ワイヤーの種類 | 信号線 |
| ケーブルジャケット | PVC / PU |
| コア数×断面積 | 4x 2x 0.34+4x 0.5 C |
| センサーの設計 | SSI付きアブソリュートエンコーダ |
| テスト電圧、rms 信号導体 | 500V |
| EN 50395 に準拠した定格電圧 U0/U 電源導体 | 30V |
| 接続ケーブルの種類 コンバータ側 | サブ-D |
| 最大ケーブル外径 | 9.3mm |
| 最大曲げ数 | 8,000,000 |

人気ラベル: スピンドル エンコーダ信号フィードバック ケーブル 6fx5002-2ca11、サプライヤー、メーカー、工場、カスタマイズ、卸売、見積もり、無料サンプル
あなたはおそらくそれも好きでしょう





お問い合わせを送る